HYPERBOLA

A hyperbola is an open curve with two branches, the intersection of a plane with both halves of a double cone. The plane does not have to be parallel to the axis of the cone; the hyperbola will be symmetrical in an case.

Hyperbolas in the physical world: three cones of light of different widths and intensities are generated by a (roughly) downwards-pointing halogen lamp and its housing . Each cone of light intersects a nearby vertical wall in a hyperbola.

Hyperbolas produced by
interference of waves
In mathematics, a hyperbola (plural hyperbolas or hyperbolae ) is a type of smooth curve lying in a plane , defined by its geometric properties or by equations for which it is the solution set. A hyperbola has two pieces, called connected components or branches, that are mirror images of each other and resemble two infinite
bows . The hyperbola is one of the three kinds of conic section , formed by the intersection of a
plane and a double cone . (The other conic sections are the parabola and the ellipse. A
circle is a special case of an ellipse). If the plane intersects both halves of the double cone but does not pass through the apex of the cones, then the conic is a hyperbola.
Hyperbolas arise in many ways: as the curve representing the function in the
Cartesian plane, as the path followed by the shadow of the tip of a sundial, as the shape of an open orbit (as distinct from a closed elliptical orbit), such as the orbit of a
spacecraft during a gravity assisted swing-by of a planet or more generally any spacecraft exceeding the escape velocity of the nearest planet, as the path of a single-apparition comet (one travelling too fast ever to return to the solar system), as the scattering trajectory of a
subatomic particle (acted on by repulsive instead of attractive forces but the principle is the same), and so on.
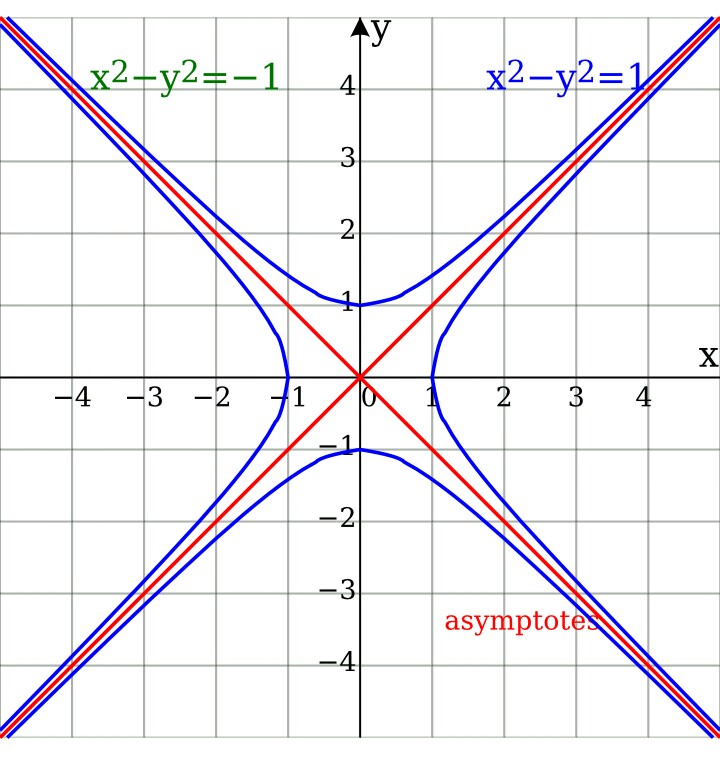
Each branch of the hyperbola has two arms which become straighter (lower curvature) further out from the center of the hyperbola. Diagonally opposite arms, one from each branch, tend in the limit to a common line, called the asymptote of those two arms. So there are two asymptotes, whose intersection is at the center of symmetry of the hyperbola, which can be thought of as the mirror point about which each branch reflects to form the other branch. In the case of the curve
the asymptotes are the two
coordinate axes.
Hyperbolas share many of the ellipses' analytical properties such as eccentricity ,
focus , and directrix . Typically the correspondence can be made with nothing more than a change of sign in some term. Many other mathematical objects have their origin in the hyperbola, such as hyperbolic paraboloids (saddle surfaces), hyperboloids ("wastebaskets"), hyperbolic geometry ( Lobachevsky's celebrated non-Euclidean geometry ), hyperbolic functions (sinh, cosh, tanh, etc.), and gyrovector spaces (a geometry proposed for use in both relativity and quantum mechanics which is not Euclidean).
Etymology and history
The word "hyperbola" derives from the Greek
ὑπερβολή, meaning "over-thrown" or "excessive", from which the English term
hyperbole also derives. Hyperbolae were discovered by Menaechmus in his investigations of the problem of doubling the cube , but were then called sections of obtuse cones. [1] The term hyperbola is believed to have been coined by Apollonius of Perga (c. 262–c. 190 BC) in his definitive work on the
conic sections , the Conics .[2] For comparison, the other two general conic sections, the ellipse and the parabola , derive from the corresponding Greek words for "deficient" and "comparable"; these terms may refer to the eccentricity of these curves, which is greater than one (hyperbola), less than one (ellipse) and exactly one (parabola).